
【效率提高 10 倍项目原创发布!】深度学习数据自动标注器开源 目标检测和图像分类(高精度高效率)
数据标注费时费力,又费钱!深谙其苦的我开发了这个项目。(如果想快速使用请看前半部分) 大家好,我是大家的好朋友~ cv 调包侠,深度学习算法攻城狮(实习僧)一枚, 下面我将诚心地发布一个自己的原创:Auto_maker!
他能干什么?
大家可以特别方便地通过我的 Auto_maker 实现目标检测数据集的实时制作,包括:10 分钟完成 真实数据采集,自动标注,转换,增强,并且可以直接进行 yolov3, yolov4 ,yolov5,efficientdet 等,并且可以直接导出成 onnx,并使用 openvino 和 tensorRT 加速;除了检测以外,还支持分类算法,可以一分钟完成图片智能分类欢迎 star~
同时他具有高精度,高实时性,高效率,他是人工标注的 10 倍以上效率,并且精度可控~
cv 调包侠录制了一个视频讲解~大家也可以通过这篇文章得到更多的了解!
注意:为了更好的效果,您在开始使用后,先按下 s 键开始标注,按下 b 键开始保存,期间如果有不准确的地方,您有几个机会去调整 boxes:1 再按下 s 键,重新描框即可;2 您可以通过 test_img 重新筛选删除图片。
项目比较简单,cv 调包侠不到半小时就把代码下面开始讲解项目结构和代码。剩下的就是在完善逻辑,优化用户体验了,改了许久,大家可以方便地使用,简单地体验~
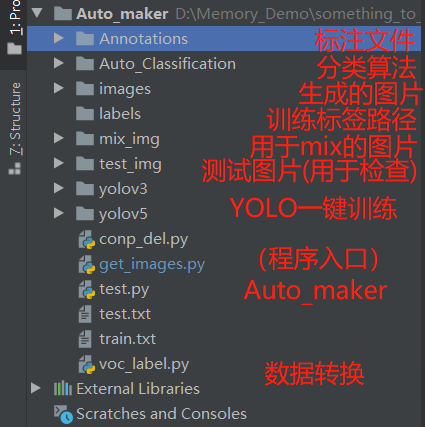
项目结构与使用教程
目标检测模式
在我们运行 Auto_maker 前,需要安装 opencv 的库:opencv-contrib-python 库
pip install opencv-contrib-python
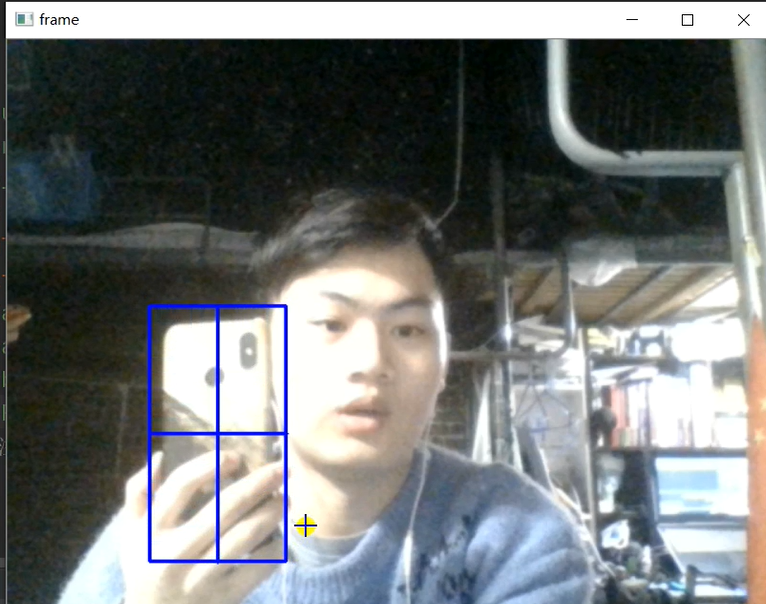
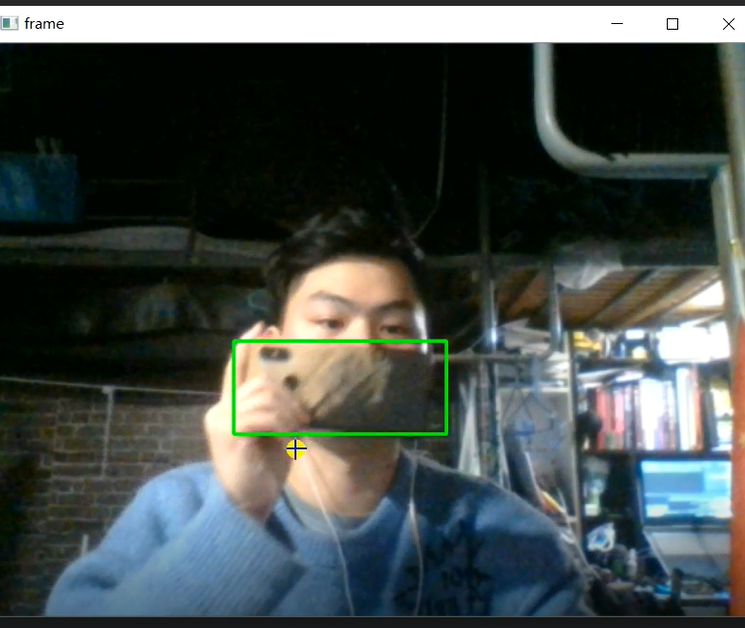
然后运行 get_images.py 就能看到实时图像,再按下"s"键就可以用鼠标绘制目标框,绘制完后回车一下~
然后按下“b”键就会看到控制台输出开始保存的提示~
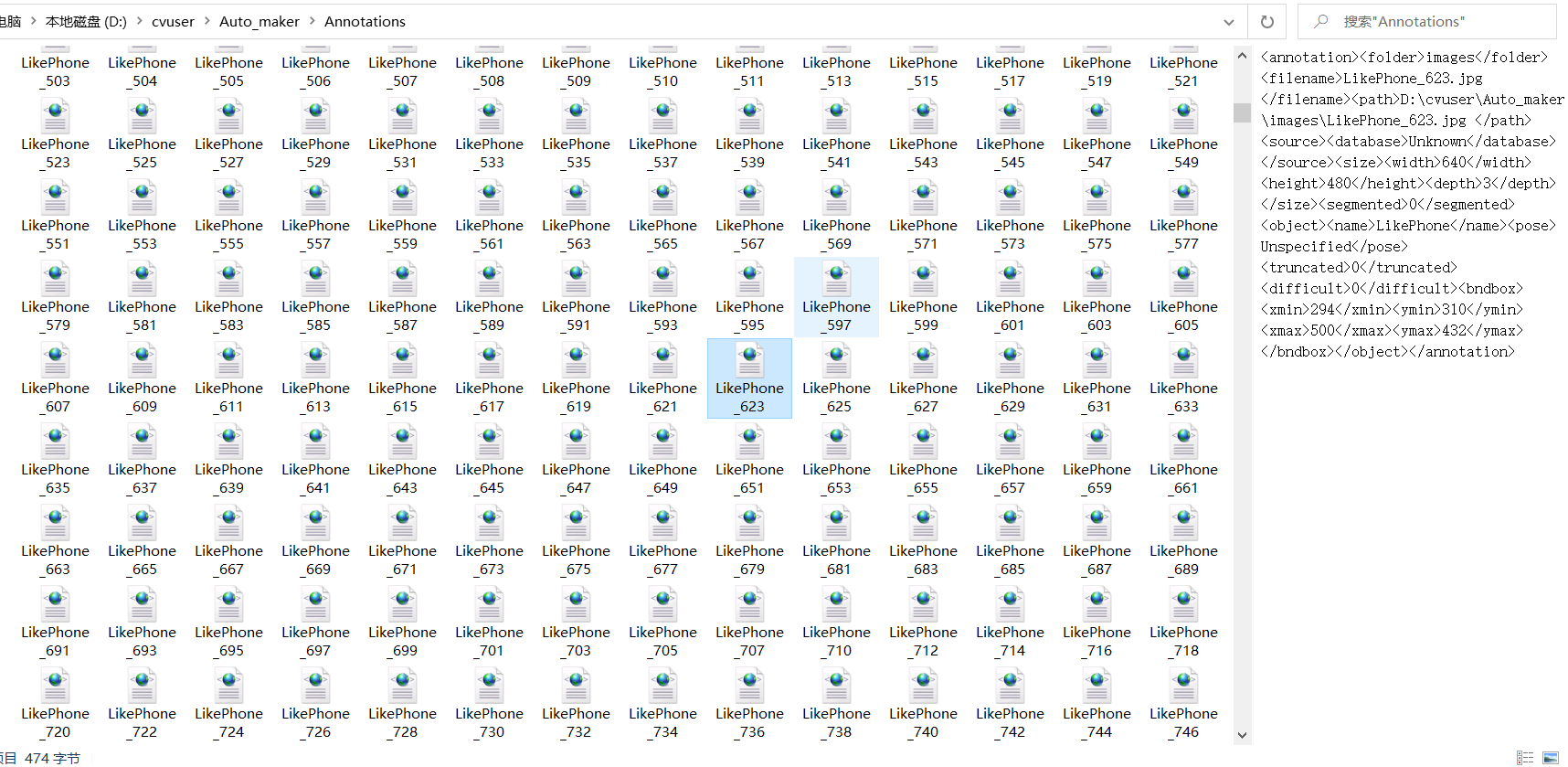
然后我们可以左右上下地平移物体,如果内外前后地移动了物体后,追踪框若是发生了偏移,那么就请再按一下“s”重新标注一下~会继续保存图片到 images 文件夹中,同时也会生成 XML 到 Annotations 文件夹中。
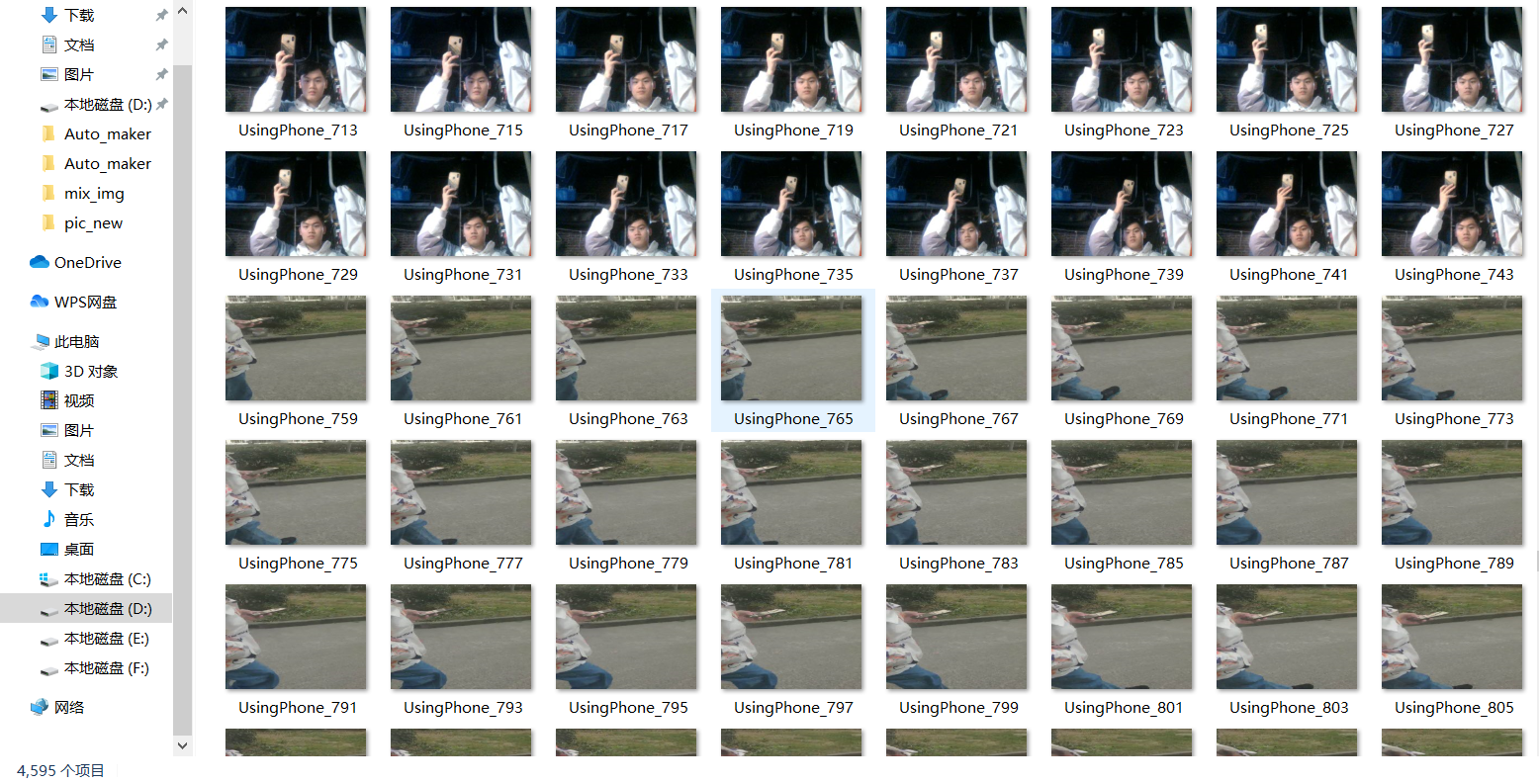
就这样,大家不断地平移,切换场景,并且打开 mix_up 模式,会获得更多,更丰富的图片,这样对我们训练的模型也会更准确和更泛化。
尤其是目标检测中的多尺度问题,需要我们丰富数据及其标注框在图片中的相对大小来解决,我在 mix_up 的同时使用了随机等比例缩放,获得更多样式~。
python
parser = argparse.ArgumentParser('Auto_maker')
parser.add_argument('-t', "--tracker", type=str, default='csrt', help='choose opencv tracker methods')
parser.add_argument('-i', '--source_path', type=str, default='0',
help='0 or 1 is your capture, or use video.mp4 or use path_dir like: ./images/')
parser.add_argument('--show', default=True, action='store_true', help='mix_up picture show')
parser.add_argument('--mix', default='./mix_img/', action='store_true',
help='default:False is do not use mix_up method, and use ./mix_up to mix_up')
parser.add_argument('--Scaling_probability', default=[0.6, 1.4], action='store_true',
help='The probability of scaling your boxes')
classes_list = ['UsingPhone', 'LikePhone'] # 类别名称 不建议使用"_"命名
obj_name = classes_list[0] # 此次标注的类别名称
args = parser.parse_args()
counter, flag = 0, 0
path = "images/"
test_path = 'test_img/'
OPENCV_OBJECT_TRACKERS = { # OPENCV_OBJECT_TRACKERS 默认使用csrt
"csrt": cv2.TrackerCSRT_create,
"kcf": cv2.TrackerKCF_create,
"boosting": cv2.TrackerBoosting_create,
"mil": cv2.TrackerMIL_create,
"tld": cv2.TrackerKCF_create,
"medianflow": cv2.TrackerMedianFlow_create,
"mosse": cv2.TrackerMOSSE_create
}
像这样,tracker 可以切换成:csrt, kcf,boosting 等方式,这是 opencv 中的追踪算法,csrt 是较准的,同时你也可以使用 deepsort 进行跟踪,或者使用自己训练好的一个模型,进行其他大量数据的预训练。
--source_path 我们可以切换为 0 :使用内置相机,切换为 1:使用外界相机; 切换为图片路径:images/ 下的图片,可以这样标注~,切换为视频路径:demo.mp4 来标注视频帧,注意一个视频帧数很多,大家可以修改程序中的 cv2.waitkey()来改善。
--show 就是显示我们的 mix_up 的图片~
--mix 是我们使用 mix_up 并且使用随机等比例缩放的路径,如果 default = False,就是不使用 mix_up 做增强,如果使用,就将 mix_img 的路径放入:./mix_img/
--Scaling_probability 就是缩放比例的区间。
classes_list :我们将所有的类别写进来,并
影像分类模式
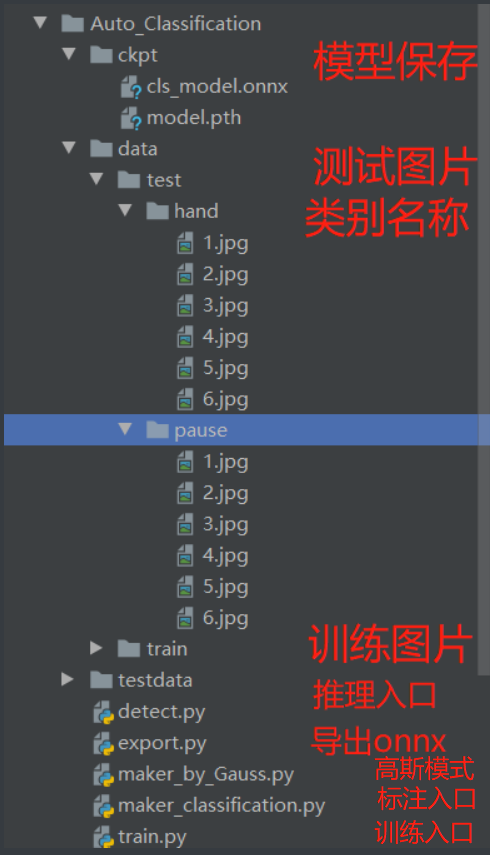
影像分类中,使用简单的固定 ROI 方式,在运行 maker_classification.py 后我们可以轻松地按下 s 键保存图片~图片就会根据 main 中的类别名称保存到 data/train/类别名/下面,如果是测试集,就在 main 中修改为 test 模式
python
parser.add_argument('--dtype', type=str, default='pause', help='your label')
parser.add_argument('--train_test', type=str, default='test', help='train/test')
--dtype:类别 修改成自己的数据类别,就会在 data/train/下面生成这样的文件夹,里面存放这个类别的图片
--train_test 现在收集的数据是训练集还是测试集。切换 train 或者 test 会分别保存到 train 或者 test 文件夹下。
数据采集演示与训练出来的模型演示
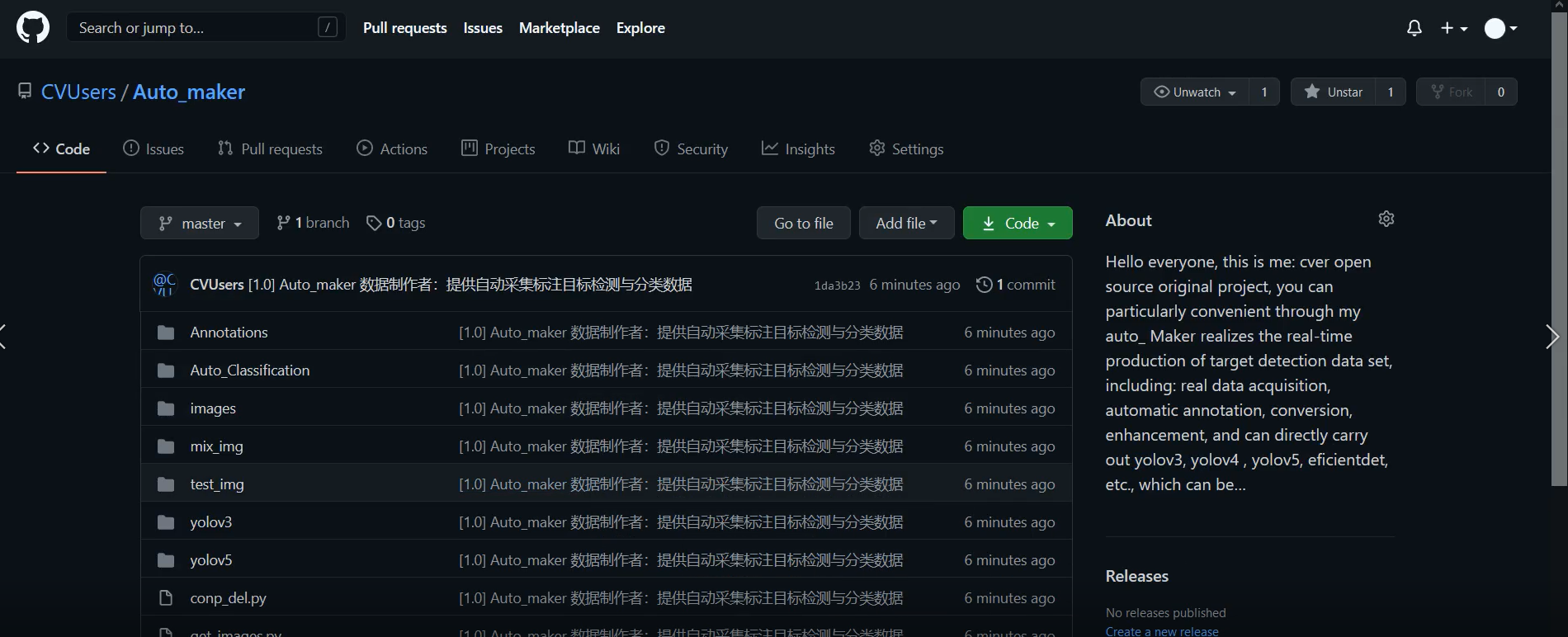
GitHub 图片
数据标注部分
自动标注过程
数据效果图
标注文件集
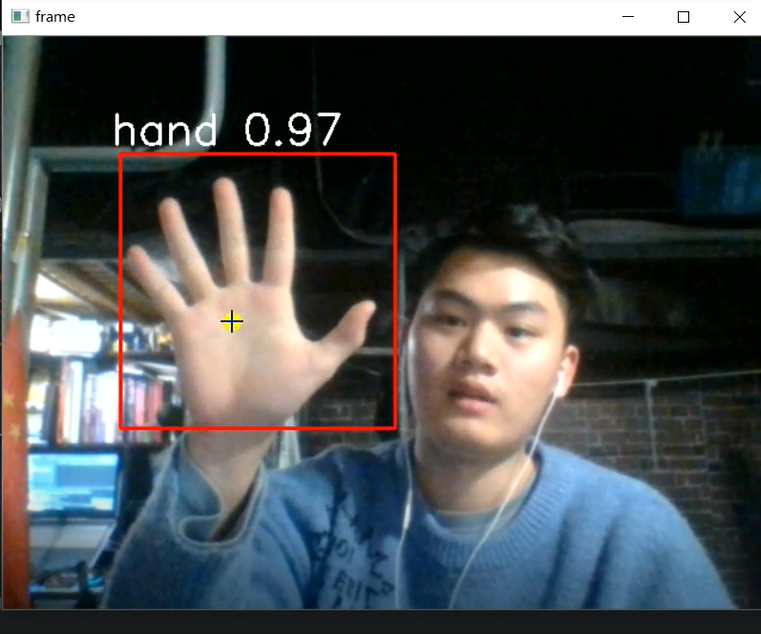
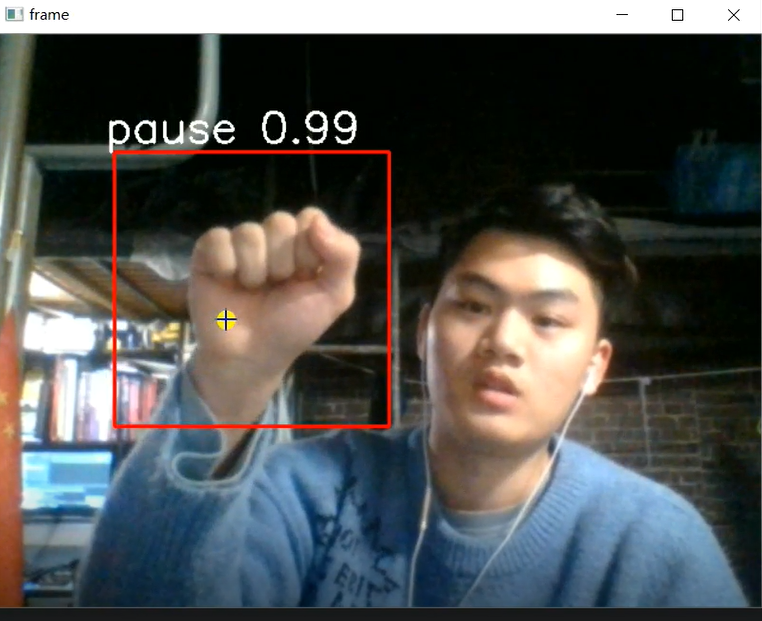
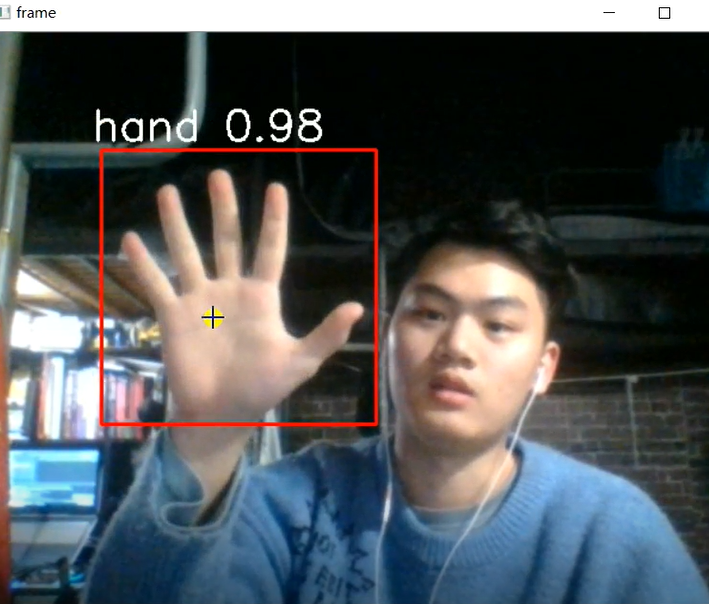
训练出来的分类模型演示【固定框检测模式】
模型已放在 GitHub 上,轻量级模型,这两天会更新更高精度模型~
一键训练 YOLOv3 YOLOv4 YOLOv5 方法
转换数据
我们现在得到了所有的图片/标注文件(同名),那么就可以开始训练了,训练过程很简单,我们只需要转换一下数据:
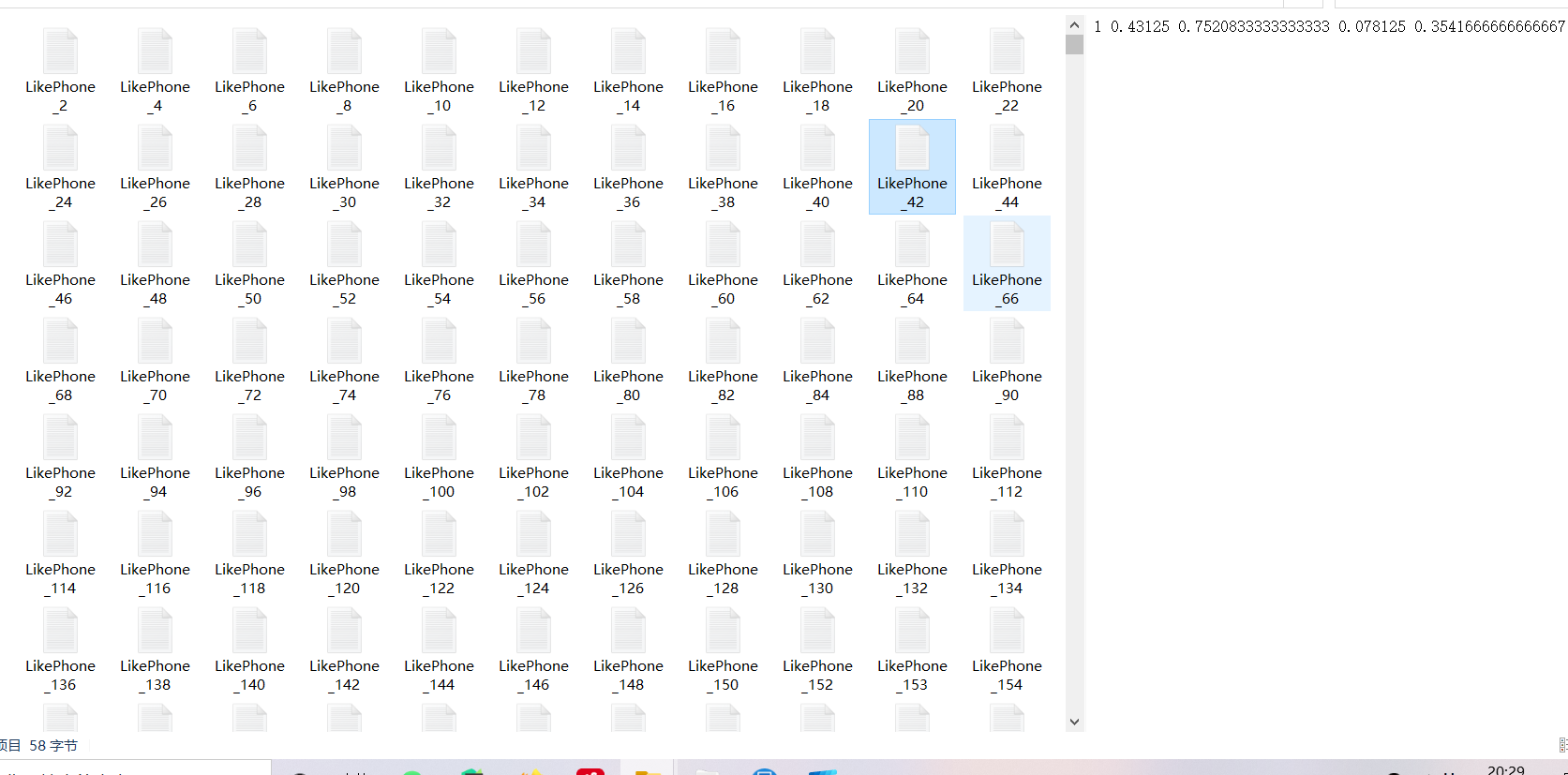
运行 voc_label.py 数据转换成 YOLO 格式:通过这个脚本,你可以在 labels 文件夹中生成归一化后的标签,同时生成一份训练集:train.txt 和测试集 test.txt
我们只需要修改 classes:类别即可。
```python import os import xml.etree.ElementTree as ET import os import cv2 import random classes = ['UsingPhone', 'LikePhone']
def convert(size, box): print(size, box) dw = 1. / size[0] dh = 1. / size[1] x = (box[0] + box[1]) / 2.0 y = (box[2] + box[3]) / 2.0 w = box[1] - box[0] h = box[3] - box[2] x = x * dw w = w * dw y = y * dh h = h * dh return (x, y, w, h)
def convert_annotation(image_id): print(image_id) in_file = open(r'./Annotations/%s' % (image_id), 'rb') # 读取xml文件路径 out_file = open('./labels/%s.txt' % (image_id.split('.')[0]), 'w') # 需要保存的txt格式文件路径 tree = ET.parse(in_file) root = tree.getroot() size = root.find('size') w = int(size.find('width').text) h = int(size.find('height').text) if w == 0 and h == 0: img = cv2.imread('./images/' +image_id.replace('xml', 'jpg')) w, h = img.shape[1], img.shape[0] for obj in root.iter('object'): cls = obj.find('name').text if cls not in classes: print(' * * * * ** ' 2, cls) break cls_id = classes.index(cls) xmlbox = obj.find('bndbox') b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text)) bb = convert((w, h), b) out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
image_ids_train = os.listdir('./Annotations') # 读取xml文件名索引
for image_id in image_ids_train: print(image_id) convert_annotation(image_id)
trainval_percent = 0.1 # 可自行进行调节 train_percent = 1 xmlfilepath = './labels' total_xml = os.listdir(xmlfilepath) num = len(total_xml) list = range(num) tv = int(num * trainval_percent) tr = int(tv * train_percent) trainval = random.sample(list, tv) train = random.sample(trainval, tr) ftest = open('./test.txt', 'w') ftrain = open('./train.txt', 'w')
for i in list: name = total_xml[i] + '\n' if i in trainval: if i in train: ftest.write('../images/' + name.replace('txt', 'jpg')) else: ftrain.write('../images/' + name.replace('txt', 'jpg')) ftrain.close() ftest.close()
```
训练与检测
训练
下面 YOLOv5 和 V3 一样,我们只需要修改 yolov5/data/voc.yaml 即可(v3 和 v4 若是使用 darknet 也是差不多哦~):
```python train: ../train.txt # 16551 images val: ../test.txt # 4952 images
number of classes
nc: 2
class names
names: ['UsingPhone', 'LikePhone'] ```
在训练此 yolov5 前,请安装 pytorch1.6 以上,如果你使用的是 torch1.5 以下,那么请区 clone yolov5 的第二个版本以下,或者你使用 yolov3~
然后修改 train.py 的这个部分
python
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='weights/yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/voc.yaml', help='data.yaml path')
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=10, help='total batch size for all GPUs')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--log-imgs', type=int, default=16, help='number of images for W&B logging, max 100')
parser.add_argument('--log-artifacts', action='store_true', help='log artifacts, i.e. final trained model')
parser.add_argument('--workers', type=int, default=0, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
--weights 预训练模型路径
--cfg 网络结构路径
--data voc.yaml 路径
训练效果图可以在 runs 下查看 result.txt
或者使用 tensorboard 查看,我们到 yolov5 或者 3 路径下执行 tensorboard --logdir=runs
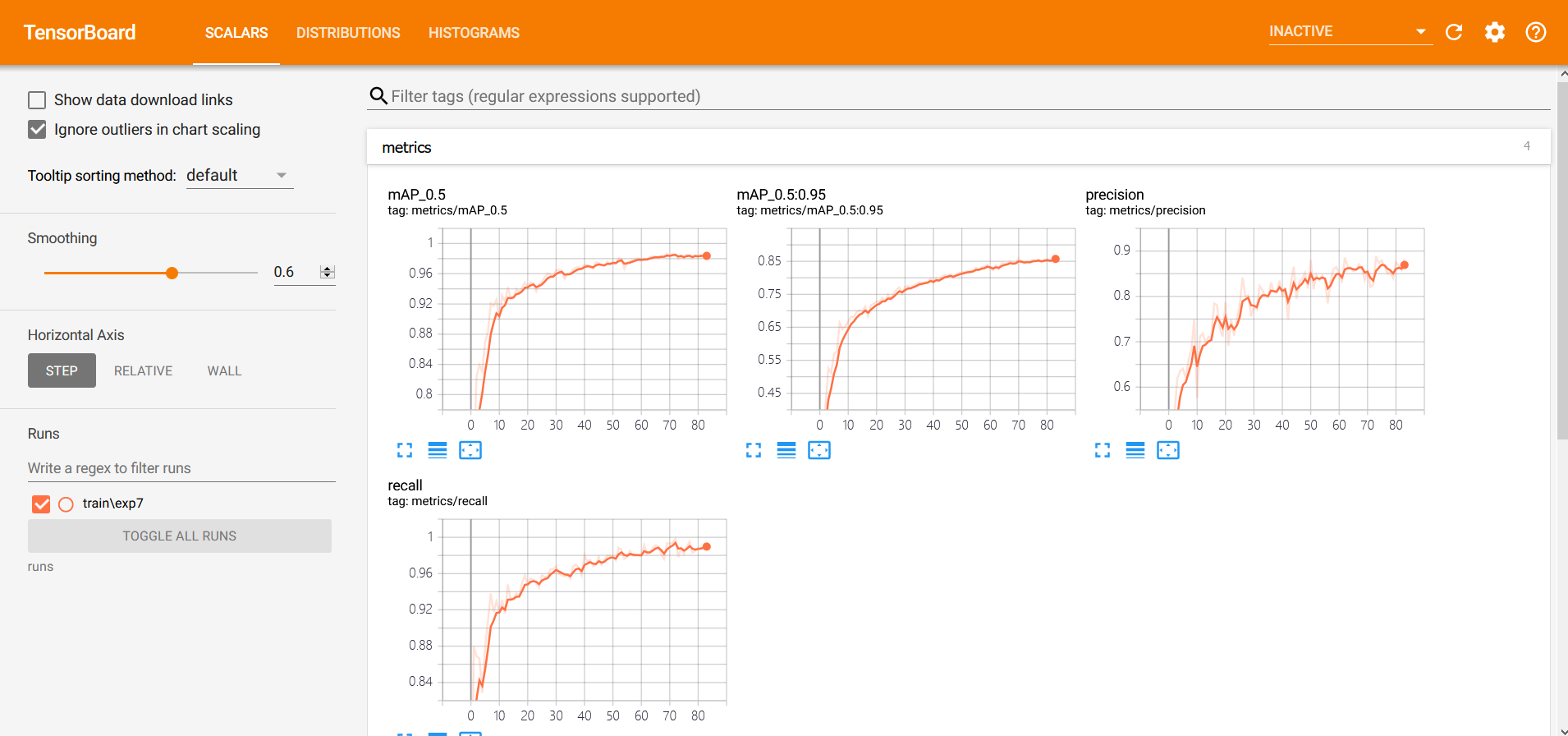
mAP 和 precision 和 recall 如下,我的模型只训练了 70 次~ 我接下来会使用 4w 张图片训练完,来查看准确率,并且实际体验效果,然后我会放在我的 GitHub 和公众号:70 次效果也不错~
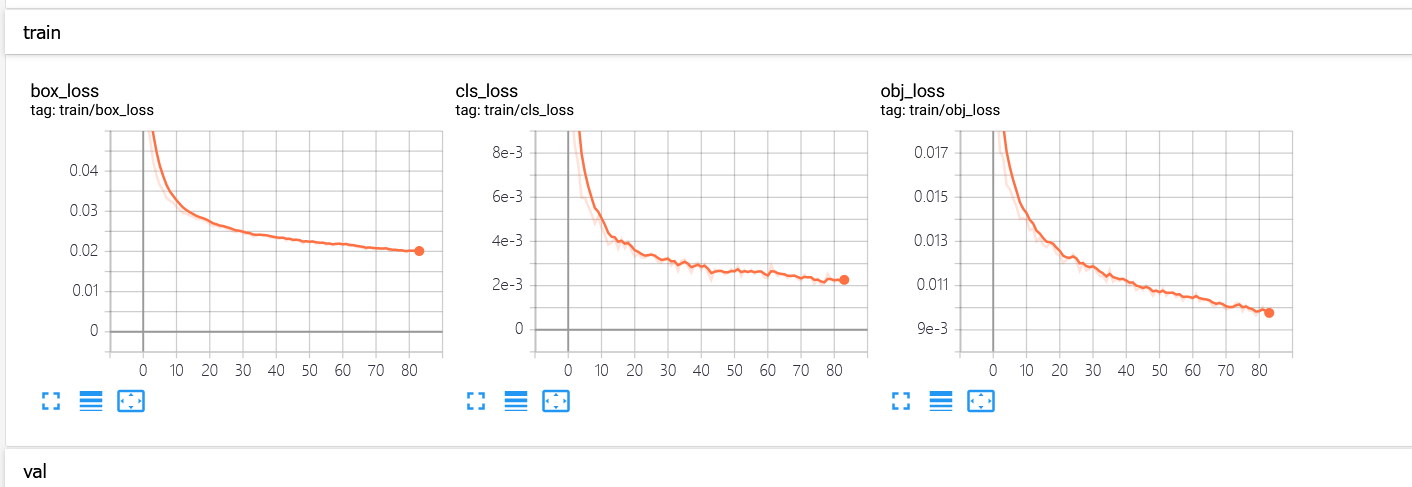
这是损失~
检测
python
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default=r'D:\cvuser\Auto_maker\yolov5\runs\train\exp7\weights\best.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='0', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.45, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', default=True, help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
我们把--weights 改成模型的绝对路径即可~
并且打开--augment 为 True
核心部分介绍
目标检测数据标注
在目标检测数据标注代码:get_images.py 中:
python
parser = argparse.ArgumentParser('Auto_maker')
parser.add_argument('-t', "--tracker", type=str, default='csrt', help='choose opencv tracker methods')
parser.add_argument('-i', '--source_path', type=str, default='0',
help='0 or 1 is your capture, or use video.mp4 or use path_dir like: ./images/')
parser.add_argument('--show', default=True, action='store_true', help='mix_up picture show')
parser.add_argument('--mix', default='./mix_img/', action='store_true',
help='default:False is do not use mix_up method, and use ./mix_up to mix_up')
parser.add_argument('--Scaling_probability', default=[0.6, 1.4], action='store_true',
help='The probability of scaling your boxes')
classes_list = ['UsingPhone', 'LikePhone'] # 类别名称 不建议使用"_"命名
obj_name = classes_list[0] # 此次标注的类别名称
args = parser.parse_args()
counter, flag = 0, 0
path = "images/"
test_path = 'test_img/'
OPENCV_OBJECT_TRACKERS = { # OPENCV_OBJECT_TRACKERS 默认使用csrt
"csrt": cv2.TrackerCSRT_create,
"kcf": cv2.TrackerKCF_create,
"boosting": cv2.TrackerBoosting_create,
"mil": cv2.TrackerMIL_create,
"tld": cv2.TrackerKCF_create,
"medianflow": cv2.TrackerMedianFlow_create,
"mosse": cv2.TrackerMOSSE_create
}
if os.path.isdir(args.source_path): # 图片文件夹自动标注
run_on_images(args.source_path, mix=args.mix)
elif os.path.isfile(args.source_path): # 标注一个视频文件
run_on_video(args.source_path, mix=args.mix)
elif '0' in args.source_path or '1' in args.source_path: # 实时标注 (建议使用实际使用时的相机录制~)
run_on_video(int(args.source_path), mix=args.mix)
程序入口,判断传入的是文件夹还是视频还是相机路径,做出相应响应。
run_on_video 函数
python
saveimg = False
mix_img = False
wd = getcwd()
tracker = OPENCV_OBJECT_TRACKERS[args.tracker]() # 定义追踪器
intBB = None
vs = cv2.VideoCapture(source)
while True:
frame = vs.read()
frame = frame[1]
frame = cv2.resize(frame, (640, 480))
frame = cv2.flip(frame, 3)
frame1 = frame.copy()
(H, W) = frame.shape[:2]
if frame is None:
break
if intBB is not None:
(success, box) = tracker.update(frame)
if success:
(x, y, w, h) = [int(v) for v in box]
if mix:
Scaling_probability = random.randint(args.Scaling_probability[0] * 10,
args.Scaling_probability[1] * 10) / 10
try:
mix_frame = cv2.resize(frame1[y:y + h, x:x + w],
(int(w * Scaling_probability), int(h * Scaling_probability)))
w_, h_ = int(w * Scaling_probability), int(h * Scaling_probability)
mix_img = mix_roi_img(mix, mix_frame, x, y, w_, h_)
if saveimg:
saveROIImg(frame, frame1, x, y, x + w_, y + h_, obj_name, flag=True, mix=mix_img)
except:
pass
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
if saveimg:
saveROIImg(frame, frame1, x, y, x + w, y + h, obj_name)
cv2.imshow('frame', frame)
key = cv2.waitKey(50) & 0xFF
if key == ord('s'):
print('class is:', obj_name)
tracker = OPENCV_OBJECT_TRACKERS[args.tracker]()
tracker1 = OPENCV_OBJECT_TRACKERS[args.tracker]()
intBB = None
intBB = cv2.selectROI('frame', frame, fromCenter=False, showCrosshair=True)
tracker.init(frame, intBB)
elif key == ord('b'):
saveimg = True
elif key == 27:
cv2.destroyAllWindows()
vs.release()
break
先通过 tracker = args.tracker () 定义追踪器,然后显示实时视频,监听鼠标,若为“s” 那么启动追踪器,并获取关键区域 roi。同时初始化追踪器。然后获取 roi 的 bounding box 位置
python
intBB = cv2.selectROI('frame', frame, fromCenter=False, showCrosshair=True)
tracker.init(frame, intBB)
在 mix_up 中:
python
def mix_roi_img(mix, img, x, y, w, h): # 使用mix_up贴图
global counter
if os.path.isdir(mix):
i = random.choice(os.listdir(mix))
img_back = cv2.imread(os.path.join(mix, i))
try:
img_back = cv2.resize(img_back, (640, 480))
except:
print(f'{os.path.join(mix, i)} connot open it!')
rows, cols, channels = img.shape # rows,cols最后一定要是前景图片的,后面遍历图片需要用到
center = [x, y] # 在新背景图片中的位置
for i in range(cols):
for j in range(rows):
# if dilate[i, j] == 0:
if center[0] + i < 640 and center[1] + j < 480:
img_back[center[1] + j, center[0] + i] = img[j, i] # 此处替换颜色,为BGR通道
cv2.imshow(f'mix_{i}', img_back)
cv2.waitKey(30)
counter += 1
if counter % 20 == 0:
cv2.destroyAllWindows()
return img_back
默认 640x480 的图片大小,大家可以修改,然后把图片进行随机贴合。大家可以在这里做更多的贴图算法优化,我这里就是像素点的转换,还有其他方法,比如边缘检测,将需要的部分留下,不需要的部分用原 mix_up 的图片替换~
```python
定义一个创建一级分支object的函数
def create_object(root, xi, yi, xa, ya, obj_name): # 参数依次,树根,xmin,ymin,xmax,ymax _object = ET.SubElement(root, 'object') # 创建一级分支object name = ET.SubElement(_object, 'name') # 创建二级分支 name.text = str(obj_name) pose = ET.SubElement(_object, 'pose') pose.text = 'Unspecified' truncated = ET.SubElement(_object, 'truncated') truncated.text = '0' difficult = ET.SubElement(_object, 'difficult') difficult.text = '0' bndbox = ET.SubElement(_object, 'bndbox') # 创建bndbox xmin = ET.SubElement(bndbox, 'xmin') xmin.text = '%s' % xi ymin = ET.SubElement(bndbox, 'ymin') ymin.text = '%s' % yi xmax = ET.SubElement(bndbox, 'xmax') xmax.text = '%s' % xa ymax = ET.SubElement(bndbox, 'ymax') ymax.text = '%s' % ya
创建xml文件的函数
def create_tree(image_name, imgdir, h, w): global annotation annotation = ET.Element('annotation') # 创建树根annotation folder = ET.SubElement(annotation, 'folder') # 创建一级分支folder folder.text = (imgdir) # 添加folder标签内容 filename = ET.SubElement(annotation, 'filename') # 创建一级分支filename filename.text = image_name path = ET.SubElement(annotation, 'path') # 创建一级分支path path.text = getcwd() + '{}{}'.format(imgdir, image_name) # 用于返回当前工作目录 source = ET.SubElement(annotation, 'source') # 创建一级分支source database = ET.SubElement(source, 'database') # 创建source下的二级分支database database.text = 'Unknown' size = ET.SubElement(annotation, 'size') # 创建一级分支size width = ET.SubElement(size, 'width') # 创建size下的二级分支图像的宽、高及depth width.text = str(w) height = ET.SubElement(size, 'height') height.text = str(h) depth = ET.SubElement(size, 'depth') depth.text = '3' segmented = ET.SubElement(annotation, 'segmented') # 创建一级分支segmented segmented.text = '0' ```
这边是 XML 树的构建。
python
def saveROIImg(frame, img, xmin, ymin, xmax, ymax, obj_name, flag=False, mix=False): # 保存图片和xml
global counter, saveimg
name = find_max_name(obj_name, mix)
H, W = frame.shape[0], frame.shape[-2]
name += 1
if flag:
print("Saving image:", name, xmin, ymin, xmax, ymax)
cv2.imwrite(path + f'mix_{obj_name}_' + str(name) + ".jpg", mix)
cv2.rectangle(mix, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
cv2.imwrite(test_path + f'mix_{obj_name}_' + str(name) + ".jpg", mix)
create_tree(f'mix_{obj_name}_' + str(name) + '.jpg ', 'images', H, W)
create_object(annotation, xmin, ymin, xmax, ymax, obj_name)
cv2.waitKey(180)
tree = ET.ElementTree(annotation)
tree.write('.\Annotations\{}.xml'.format(f'mix_{obj_name}_' + str(name)))
return
print("Saving image:", name, xmin, ymin, xmax, ymax)
cv2.imwrite(path + f'{obj_name}_' + str(name) + ".jpg", img)
cv2.imwrite(test_path + f'{obj_name}_' + str(name) + ".jpg", frame)
cv2.imshow('images', img)
create_tree(f'{obj_name}_' + str(name) + '.jpg ', 'images', H, W)
create_object(annotation, xmin, ymin, xmax, ymax, obj_name)
cv2.waitKey(50)
tree = ET.ElementTree(annotation)
tree.write('.\Annotations\{}.xml'.format(f'{obj_name}_' + str(name)))
保存模式,选择是否保存 mix_up 的图片。
分类
maker_classification.py
```python import argparse
import win32api import win32con import cv2 as cv import os import numpy as np save_path = 'data'
def get_roi(frame, x1, x2, y1, y2): dst = frame[y1+2:y2, x1+2:x2] cv.rectangle(frame, (x1, y1), (x2, y2), (0, 0, 255), thickness=1) return dst
def get_data(dtype): max = 0 for i in os.listdir('data/{}/{}'.format(args.train_test, dtype)): if int(i.split(' ')[2].split('.')[0]) > max: max = int(i.split(' ')[2].split('.')[0])
return max + 1
def main(): if not os.path.isdir('./data/'): os.makedirs('./data/') if not os.path.isdir('./data/train/'): os.makedirs('./data/train/') if not os.path.isdir('./data/test/'): os.makedirs('./data/test/') if not os.path.isdir('./data/train/{}'.format(args.dtype)): os.makedirs('./data/train/{}'.format(args.dtype)) if not os.path.isdir('./data/test/{}'.format(args.dtype)): os.makedirs('./data/test/{}'.format(args.dtype)) m_0 = get_data(args.dtype) capture = cv.VideoCapture(0) while True: ret, frame = capture.read() roi = get_roi(frame, 100, 350, 100, 350) k = cv.waitKey(20) if k == 27: # 按下ESC退出 break elif k == ord('s'): # 按下'A'会保存当前图片到指定目录下
cv.imwrite("{}/{}/{}/{}.jpg".format(save_path, args.train_test, args.dtype, m_0), roi)
m_0 += 1
# flip_image = cv.flip(skin, 1) # 这里用到的是水平翻转,因为后面的参数是一
# cv.imwrite("E:\\aiFile\\picture\\gesture_data\\0\\%s.jpg" % m_0, flip_image)
# m_0 += 1
print('正在保存0-roi图片,本次图片数量:', m_0)
cv.imshow("roi", roi)
cv.imshow("frame", frame)
c = cv.waitKey(20)
if c == 27:
break
cv.waitKey(0)
capture.release()
cv.destroyAllWindows()
if name == ' main ': parser = argparse.ArgumentParser() parser.add_argument('--dtype', type=str, default='pause', help='your label') parser.add_argument('--train_test', type=str, default='test', help='train/test')
args = parser.parse_args()
main()
```
maker_by_Guss.py
```python import cv2 import imutils import numpy as np import argparse import os
bg = None
def run_avg(image, aWeight): global bg if bg is None: bg = image.copy().astype('float') return
cv2.accumulateWeighted(image, bg, aWeight)
def segment(image, threshold=25): global bg diff = cv2.absdiff(bg.astype('uint8'), image)
thresholded = cv2.threshold(diff,
threshold,
255,
cv2.THRESH_BINARY)[1]
(cnts, _) = cv2.findContours(thresholded.copy(),
cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
if len(cnts) == 0:
return
else:
segmented = max(cnts, key=cv2.contourArea)
return (thresholded, segmented)
def main(dtype): aWeight = 0.5
camera = cv2.VideoCapture(0)
top, right, bottom, left = 90, 380, 285, 590
num_frames = 0
thresholded = None
count = 0
while(True):
(grabbed, frame) = camera.read()
if grabbed:
frame = imutils.resize(frame, width=700)
frame = cv2.flip(frame, 1)
clone = frame.copy()
(height, width) = frame.shape[:2]
roi = frame[top:bottom, right:left]
gray = cv2.cvtColor(roi, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (7, 7), 0)
if num_frames < 30:
run_avg(gray, aWeight)
else:
hand = segment(gray)
if hand is not None:
(thresholded, segmented) = hand
cv2.drawContours(
clone, [segmented + (right, top)], -1, (0, 0, 255))
cv2.rectangle(clone, (left, top), (right, bottom), (0, 255, 0), 2)
num_frames += 1
cv2.imshow('Video Feed', clone)
if not thresholded is None:
cv2.imshow('Thesholded', thresholded)
keypress = cv2.waitKey(1) & 0xFF
if keypress == ord('q'):
break
if keypress == ord('s'):
if not os.path.isdir('./data/'):
os.makedirs('./data/')
if not os.path.isdir('./data/train/'):
os.makedirs('./data/train/')
if not os.path.isdir('./data/test/'):
os.makedirs('./data/test/')
if not os.path.isdir('./data/train/{}'.format(args.dtype)):
os.makedirs('./data/train/{}'.format(args.dtype))
if not os.path.isdir('./data/test/{}'.format(args.dtype)):
os.makedirs('./data/test/{}'.format(args.dtype))
cv2.imwrite('data/{}/saved_v2_{:04}.jpg'.format(dtype, count), thresholded)
count += 1
print(count, 'saved.')
else:
camera.release()
break
if name == ' main ': parser = argparse.ArgumentParser() parser.add_argument('--dtype', type=str, default='pause', help='your label') args = parser.parse_args() main(args.dtype) cv2.destroyAllWindows()
```
使用高斯边缘消除后保存,适用于特征鲜明物体。
分类训练部分
```python class Net(nn.Module): def init (self, num_classes=2): super(). init () self.net = mobilenet_v2(pretrained=True) # backbone + neck + head self.avg_pool = nn.AdaptiveAvgPool2d(1) self.logit = nn.Linear(1280, len(args.classes)) # [bs, 1280] -> [bs, classes]
def forward(self, x): # [bs,3,224,224]
x = self.net.features(x) # [bs, 1280, 7, 7] 224//32
x = self.avg_pool(x) # [bs, 1280, 1, 1]
x = x.view(x.size(0), -1) # [bs, 1280]
# x = torch.reshape()
x = self.logit(x)
return x
```
定义网络和主干网络
```python def run(images_list, val_list): train_dataset = GestureDataset(images_list) train_dataloader = DataLoader( train_dataset, batch_size=args.batch_size, shuffle=True, num_workers=0, ) val_dataset = GestureDataset(val_list) val_dataloader = DataLoader( val_dataset, batch_size=args.batch_size, shuffle=True, num_workers=0 ) model = Net()
model.cuda()
optimizer = torch.optim.Adam(model.parameters(), lr=1.5e-4)
loss_fn = nn.CrossEntropyLoss()
best_score = float("inf") # 0XFFFFFFF
best_acc = 0.
for epoch in range(args.epochs):
print('Epoch:', epoch)
train_one(train_dataloader, model, optimizer, loss_fn, None)
scores = val_one(val_dataloader, model, loss_fn)
if scores['loss'] <= best_score:
best_score = scores['loss']
print('*****best_loss:', best_score, 'acc:', best_acc)
if scores['accuracy'] >= best_acc:
best_acc = scores['accuracy']
print('*******save best*******', epoch)
torch.save(model.state_dict(), "ckpt/model.pth")
```
训练部分
```python class GestureDataset(Dataset): def init (self, images_list, transformers=None): self.images_list = images_list # 3000 self.transformers = transformers def len (self): return len(self.images_list) def normalize(self, image): image = np.transpose(image, (2, 0, 1)) # [3,224,224] mean = [0.485, 0.56, 0.06] std = [0.229, 0.224, 0.225] image = image.astype(np.float32) / 255 # [0,1] image -= np.array(mean).reshape((3,1,1)) image /= np.array(std).reshape((3,1,1)) # image[0] -= mean # [-0.5, 0.5] # image /=std # [] return image
def __getitem__(self, index: int):
image_size = 224
name:str = self.images_list[index]
image_name = name
image = np.array(Image.open(image_name)) # uint8 [0-255]
image = cv2.resize(image, (image_size,image_size))
label_str = args.classes.index(name.split("\\")[-2])
label = int(label_str)
result = {
"image": self.normalize(image),
"label": label
}
return result
```
数据增强和数据读取
分类推理部分
detect.py
```python import argparse
import torch import cv2 import os from PIL import Image from torchvision import transforms import torch, torch.nn as nn, torch.nn.functional as F from torchvision.models.mobilenet import mobilenet_v2 import time device = torch.device('cuda') mean = [0.485, 0.456, 0.406] std = [0.229, 0.224, 0.225] transform = transforms.Compose([ transforms.Resize(224), transforms.ToTensor(), transforms.Normalize(mean=mean, std=std) ])
class Net(nn.Module): def init (self, num_classes=2): super(). init () self.net = mobilenet_v2(pretrained=True) # backbone + neck + head self.avg_pool = nn.AdaptiveAvgPool2d(1) self.logit = nn.Linear(1280, len(args.classes)) # [bs, 1280] -> [bs, classes]
def forward(self, x): # [bs,3,224,224]
x = self.net.features(x) # [bs, 1280, 7, 7] 224//32
x = self.avg_pool(x) # [bs, 1280, 1, 1]
x = x.view(x.size(0), -1) # [bs, 1280]
# x = torch.reshape()
x = self.logit(x)
return x
def predict(): # net = torch.load('./ckpt/model.pth') # net = net.cuda() net = Net() net.load_state_dict(torch.load(args.model)) net = net.cuda() net.eval() # net.to("cuda") # net.to(torch.device("cuda:0")) torch.no_grad() return net
def run(img): img = Image.fromarray(img[:, :, ::-1]) # img = Image.open(img_path) img = transform(img).unsqueeze(0) img_ = img.to(device) outputs = net(img_) outputs = torch.softmax(outputs, dim=1) score, predicted = torch.max(outputs, 1) return score[0].item(), predicted[0].item()
def get_roi(frame, x1, x2, y1, y2): dst = frame[y1:y2, x1:x2] cv2.rectangle(frame, (x1 -2, y1-2), (x2+4, y2+4), (0, 0, 255), thickness=2) return dst
if name == ' main ': parser = argparse.ArgumentParser() parser.add_argument('--classes', type=str, default=['pause', 'hand'], help='your label') parser.add_argument('--source', type=int, default=0, help='your label') parser.add_argument('--model', type=str, default='./ckpt/model.pth', help='your label') parser.add_argument('--threshold', type=str, default='0.9', help='your label') args = parser.parse_args() net = predict() video = cv2.VideoCapture(args.source) while True: time1 = time.time() ret, img = video.read() img_copy = img roi = get_roi(img, 100, 324, 100, 324) # cv2.rectangle(img_copy, (95, 95), (328, 328), (0, 0, 255), thickness=1) if ret: cv2.imshow('img', roi) score, name = run(roi) name = args.classes[name] if float(score) >= float(args.threshold): cv2.putText(img_copy, str(name + ' '+str(round(score, 2))), (90, 90), cv2.FONT_HERSHEY_SIMPLEX, 1.2, (255, 255, 255), 2) cv2.imshow('frame', img_copy) time2 = time.time() print("Inference Time:", round(time2 - time1, 3)) cv2.waitKey(5) ```
效果图:
模型导出部分
mobilenet-v2 模型导出 onnx 部分
```python import torch,onnx,collections import torch.nn as nn from torchvision.models.mobilenet import mobilenet_v2 class Net(nn.Module): def init (self, num_classes=3): super(). init () self.net = mobilenet_v2(pretrained=True) # backbone + neck + head self.avg_pool = nn.AdaptiveAvgPool2d(1) self.logit = nn.Linear(1280, num_classes) # [bs, 1280] -> [bs, classes]
def forward(self, x): # [bs,3,224,224]
x = self.net.features(x) # [bs, 1280, 7, 7] 224//32
x = self.avg_pool(x) # [bs, 1280, 1, 1]
x = x.view(x.size(0), -1) # [bs, 1280]
# x = torch.reshape()
x = self.logit(x)
return x
print('notice !!!! ----> use python3 run this script!!! \n') INPUT_DICT = 'ckpt\model.pth' OUT_ONNX = 'ckpt\cls_model.onnx'
x = torch.randn(1, 3, 224, 224) input_names = ["input"] out_names = ["output"] net = Net() xmodel= torch.load(INPUT_DICT, map_location=torch.device('cuda')) net.load_state_dict(xmodel) net.eval()
torch.onnx.export(net, x, OUT_ONNX, export_params=True, training=False, input_names=input_names, output_names=out_names) print('please run: python3 -m onnxsim test.onnx test_sim.onnx\n') print('convert done!\n')
```
yolov3 和 yolov5 导出和 openvino 推理代码见:
yolov5 使用 TensorRT 推理代码见:
后续优化
这是 cv 调包侠的原创项目,没有参考过任何人,当然后来也看过网上用类似的方法实现了,但是我的更完整,完善,可移植性高,并且自带数据增强。
数据增强中,massic 我没有使用,因为大多数模型自带 massic,如果经过两次 massic 会更小,误检上会有问题。
优化 tips1: 使用更多数据增强
但是不是越多增强越好~,比如我们没有使用翻转,因为模型自带翻转,以及 hsv 通道的增强,旋转和亮度,我们无需管,还有其他的数据正确策略,比如 cut-mix ,等等,欢迎 fork 我的项目,并且完善~让项目更加简单,更高效:
优化 tips2:使用高质量相机采集,或者修改图片 size 获取更高清图片
优化 tips3:使用更高质量跟踪算法:比如 deepsort ,我已经做了,后续慢慢会开源
优化 tips4:在使用的使用,尽量使用左右上下平移,这样会保证 boxes 更拟合。然后在调整了前后距离(大小)后,重新描框。
优化 tips5:使用更接近场景的 mix_up 图片。
优化 tips6:更换更多场景,更多人物摄制,并获取更多数据。
优化 tips7:大家一起加入进来一起完善!我有个优质公众号和两个深度学习交流群~大家进来一起交流,获取大量 AI 深度学习数据集,和交流更优质的算法
参考文献
- 基于深度学习信息抽取和知识图谱问答的研究与实现(西安电子科技大学·陈春荣)
- 基于个性化推荐的众包数据标注系统的设计与实现(华东师范大学·马锐)
- 基于SSM框架的汽车资讯标注系统的设计与实现(华中科技大学·单鸾)
- 中文作文标注平台的设计与实现(北京交通大学·蔺熙如)
- 基于个性化推荐的众包数据标注系统的设计与实现(华东师范大学·马锐)
- 基于个性化推荐的众包数据标注系统的设计与实现(华东师范大学·马锐)
- 基于深度学习信息抽取和知识图谱问答的研究与实现(西安电子科技大学·陈春荣)
- 众包文本标注系统的设计与实现(南京大学·王涛)
- 中文作文标注平台的设计与实现(北京交通大学·蔺熙如)
- 深度学习在社交网络文本分类中的应用研究(大连交通大学·方金朋)
- 基于SSM框架的汽车资讯标注系统的设计与实现(华中科技大学·单鸾)
- 基于Python的非结构化数据检索系统的设计与实现(南京邮电大学·董海兰)
- 融合物品标签的推荐系统研究(烟台大学·武聪)
- 基于Spring Boot的标注平台系统的设计与实现(南京大学·季灵杰)
- 基于Spring Boot的标注平台系统的设计与实现(南京大学·季灵杰)
本文内容包括但不限于文字、数据、图表及超链接等)均来源于该信息及资料的相关主题。发布者:毕设小屋 ,原文地址:https://m.bishedaima.com/yuanma/35898.html









