
使用演化算法玩pacman吃豆人
一、实现演化算法的关键步骤
1.1 演化算法玩 Pacman 的整体流程
首先由 registerInitialState 函数进行第一次 getActions,将第一轮的动作序列存入 self.actions。
python
def registerInitialState(self, state):
"""
This is the first time that the agent sees the layout of the game
board. Here, we choose a path to the goal. In this phase, the agent should compute the path to the goal and store it in a local variable. All of the work is done in this method!
state:
a GameState object (pacman.py)
"""
problem = self.searchType(state) # Makes a new search problem
self.actions = self.getActions(problem) # Find a path
之后则调用参数为 state 的 getAction 函数,对它进行了修改使之能够在 self.actions 执行完时调用参数为 problem 的 getAction 函数更新新的动作序列,若新的动作序列为空,则到达目标,不需再执行。
参数为 problem 的 getAction 函数是演化算法的主函数,依次进行了类变量的初始化、种群的初始化、迭代 T 轮、选取 fitness 最低(这里最低为最优)的解的动作序列。每轮迭代内依次进行了父辈选择、交叉生成子代、获取子代的 fitness,直到产生了指定数量的后代,进行生存选择。
c++
def getActions(self, problem):
'''
The main iteration in Evolutionary algorithms.
You can use getFitness, generateLegalActions, mutation, crossover and other function to evolve the population. :
param problem:
:
return:
the best individual in the population
'''
self.problem = problem self.population = None
self.generateLegalActions() for i in range(0, self.T):
offspringList = []
for j in range(0, int(self.offspringNum / 2)):
parent1, parent2 = self.selectParents()
offspring1, offspring2 = self.crossover(parent1, parent2)
offspring1 = self.mutation(offspring1)
offspring2 = self.mutation(offspring2)
score1 = self.getFitness(offspring1[self.actionDim][0]) score2 = self.getFitness(offspring2[self.actionDim][0])
offspringList.append([offspring1, score1])
offspringList.append([offspring2, score2])
self.population = sorted(self.population, key=lambda x: x[1])
[:self.popSize - self.offspringNum]
self.population = self.population + offspringList
actions = []
self.population = sorted(self.population, key=lambda x: x[1]) for i in range(1, self.actionDim + 1):
actions.append(self.population[0][0][i][1])
if self.population[0][0][self.actionDim][0] in positionDict.keys():
positionDict[self.population[0][0][self.actionDim][0]] += 1 else:
positionDict[self.population[0][0][self.actionDim][0]] = 1
return actions
1.2 解的表示和合法解的生成
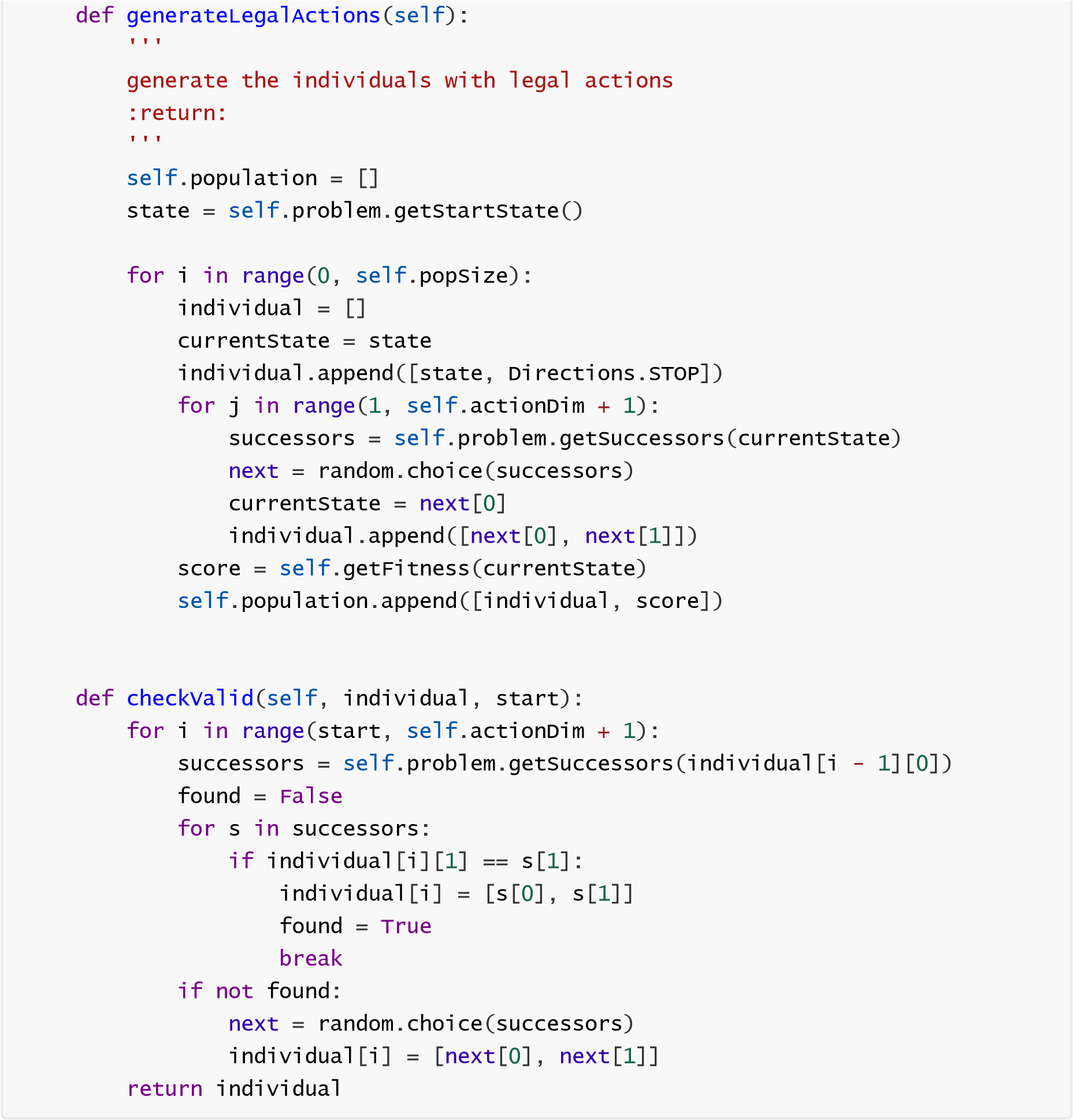
解的表示包含在一个长度为 actionDim+1 的数组里。数组元素为一个列表,列表的 0 号位为执行当前动作后的位置和执行的当前动作组成的列表,1 号位为该位置对应的 fitness。数组 0 号位置存储当前演化算法的初始状态,后面依次为 actionDim 步。数组的 1 到 actionDim 号位的动作序列即为最后执行的动作序列。合法解的生成主要由下面两个函数保证。其中 generateLegalActions 函数是种群初始化时使用的,其使用 self.problem.getSuccessors 函数获取当前状态可选的动作,再随机选取其中的一个动作,保证每一步获取的动作都是合法的。checkValid 函数则是保证突变和交叉后的解合法,其从第一个突变点/交叉点开始,基于前一步所到达的位置对后续的动作序列合法性进行检验,对于合法的动作,不改变动作,只更新位置;对于不合法的动作,则随机选取一个可选动作,并同时更新动作和位置,以保证最后得到的解合法。
1.3 评估函数设计
对每个解进行评估,使用解的最后一个动作执行后到达的状态进行评估,一开始使用的曼哈顿距离,但容易陷入局部最优,即在离目标比较近但隔着墙的地方打转,为避免这种情况,我新增了一个positionDict 字典,对每次使用演化算法后最后到达的位置进行计数,作为最终位置的次数对 fitness 影响的放大倍率乘以最后到达的位置之前作为最终位置的次数,再加上曼哈顿距离,得到 fitness,当然, fitness 越低越优。除此之外,如果不利用 A 算法,很难想到其他有效的 fitness 计算方法可以绕开局部最优,但感觉如果使用 A 算法就没有使用演化算法的必要了。
1.4 演化算子设计
突变使用 bit-wise,若该位发生突变,则在剩下的可选动作中随机选取一个。(若该状态只有原先的一个动作可选,则不变)
python
def mutation(self, individual):
first = 0
for i in range(1, self.actionDim + 1):
if random.random() < self.mutateProb:
successors = self.problem.getSuccessors(individual[i - 1][0])
otherAction = []
for j in range(0, len(successors)):
if successors[j][1] != individual[i][1]:
otherAction.append([successors[j][0], successors[j][1]]) if len(otherAction) != 0:
next = random.choice(otherAction)
individual[i] = [next[0], next[1]] if first == 0:
first = i if first == 0:
return individual else:
return self.checkValid(individual, first + 1)
交叉使用单点交叉。
c++
def crossover(self, parent1, parent2):
crossPoint = random.randint(2, len(parent1[0]) - 1)
offspring1 = parent1[0][:crossPoint] + parent2[0][crossPoint:]
offspring2 = parent2[0][:crossPoint] + parent1[0][crossPoint:]
return self.checkValid(offspring1, crossPoint), self.checkValid(offspring2, crossPoint)
父辈选择使用轮盘赌法,fitness 越小,被选中的概率越大。
c++
if self.population[0][1] != 0:
for i in range(0, self.popSize):
sumFitness += 1.0 / self.population[i][1] for _ in range(0, 2):
temp = 0
randomNum = random.uniform(0, sumFitness) for i in range(self.popSize - 1, -1, -1):
temp += 1.0 / self.population[i][1] if randomNum <= temp:
choosen.append(self.population[i])
break else:
for i in range(0, self.popSize):
sumFitness += 1.0 / (self.population[i][1] + 1) for _ in range(0, 2):
temp = 0
randomNum = random.uniform(0, sumFitness) for i in range(self.popSize - 1, -1, -1):
temp += 1.0 / (self.population[i][1] + 1) if randomNum <= temp:
choosen.append(self.population[i])
break
return choosen[0], choosen[1]
生存选择使用精英策略,优先保留 fitness 低的。但这样容易导致陷入局部最优,考虑修改为优先保留新的。
二、实验效果
2.1 具体参数设定以及使用评估函数的次数及分数
2.1.1 smallMaze
动作序列长度 actionDim=20,迭代轮数 T = 100,种群大小 popSize = 100,每位的突变概率 mutateProb = 0.2,每轮产生的后代数量 offspringNum = 20,作为最终位置的次数对 fitness 影响的放大倍率 times = 10。
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 23100 | 309 |
| 2 | 16800 | 351 |
| 3 | 23100 | 309 |
| 4 | 18900 | 339 |
| 5 | 18900 | 337 |
2.1.2 openMaze
动作序列长度 actionDim=30,迭代轮数 T = 200,种群大小 popSize = 200,每位的突变概率 mutateProb = 0.2,每轮产生的后代数量 offspringNum = 40,作为最终位置的次数对 fitness 影响的放大倍率 times = 20。
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 16400 | 450 |
| 2 | 32800 | 418 |
| 3 | 32800 | 402 |
| 4 | 24600 | 420 |
| 5 | 24600 | 432 |
运行时可发现可以很好的跳出局部最优。
2.1.3 bigMaze
动作序列长度 actionDim=10,迭代轮数 T = 100,种群大小 popSize = 100,每位的突变概率 mutateProb = 0.2,每轮产生的后代数量 offspringNum = 20,作为最终位置的次数对 fitness 影响的放大倍率 times = 50。
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 504000 | -1886 |
| 2 | 539700 | -2058 |
| 3 | 478800 | -1768 |
| 4 | 380100 | -1298 |
| 5 | 302400 | -924 |
针对这种局部最优特别多的迷宫型地图,只能降低每次演化算法的计算负担,让它在较短的时间内在局部最优附近徘徊,并将他们作为最后位置的数量刷上去,这样才能尽快跳出,故按照这个理念设置了参数。但在实际运行时,虽然能够跳出局部最优,但算法仍然难以将正确路径和断头路区分开,实际运行下来仍然需要花费大量时间。
任务二
这个任务要求你在 Search 和 Classic 环境中测试你在任务一中实现的演化算法,具体测试地图:
Search1、 Search2 、 Search3;
minimaxClassic、originalClassic、powerClassic。
三、测试结果
由于此前演化算法的启发式函数是基于找出口而设计的,在找食物的环境中表现其实比较一般。
3.1 Search1
动作序列长度 actionDim=5,迭代轮数 T = 50,种群大小 popSize = 50,每位的突变概率 mutateProb =0.2
,每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =50
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 3850 | 506 |
| 2 | 4950 | 498 |
| 3 | 4400 | 504 |
| 4 | 3850 | 506 |
| 5 | 3850 | 506 |
因为这个地图很小,其实动作序列不需要很长,由于动作序列短,种群的大小、迭代次数、每次迭代的后代数都可以相应减少,放大倍率可以设置的大一些,以偏向于探索未访问的地方,更快吃到食物而不是在原先问题的目标附近徘徊。
3.2 Search2
动作序列长度 actionDim=5,迭代轮数 T = 50,种群大小 popSize = 50,每位的突变概率 mutateProb =0.2
每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =100
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 7700 | 560 |
| 2 | 6600 | 571 |
| 3 | 7700 | 560 |
| 4 | 6600 | 572 |
| 5 | 7700 | 561 |
地图变大了,放大倍率可以再设置的大一些,以偏向于探索未访问的地方,更快吃到食物而不是在原先问题的目标附近徘徊。
3.3 Search3
动作序列长度 actionDim=10,迭代轮数 T = 20,种群大小 popSize = 20,每位的突变概率 mutateProb =0.2
,每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =150
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 5280 | 579 |
| 2 | 4840 | 590 |
| 3 | 4620 | 604 |
| 4 | 10780 | 321 |
| 5 | 5060 | 587 |
地图又变大了,同样放大倍率可以再设置的大一些,同时可以也适当增大一下动作序列长度,并减少迭代轮数和种群大小,以使解不容易偏向向原先问题的目标聚集。
3.4 minimaxClassic
动作序列长度 actionDim=5,迭代轮数 T = 20,种群大小 popSize = 20,每位的突变概率 mutateProb =0.2
每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =50
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 440 | -499 |
| 2 | 440 | -497 |
| 3 | 220 | -492 |
| 4 | 220 | -493 |
| 5 | 220 | -493 |
地图比较小,故动作序列长度也设置的小一点,但地图太小,精灵的密度太大,启发式函数又没用到食物信息,这种地图该演化算法基本无法获胜。
3.5 originalClassic
动作序列长度 actionDim=10,迭代轮数 T = 20,种群大小 popSize = 20,每位的突变概率 mutateProb =0.2
每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =150
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 4620 | -47 |
| 2 | 1100 | -354 |
| 3 | 3300 | -267 |
| 4 | 1540 | -366 |
| 5 | 3080 | -253 |
地图比较大,同样采用类似 Search3 的思路设置参数。
3.6 powerClassic
动作序列长度 actionDim=10,迭代轮数 T = 20,种群大小 popSize = 20,每位的突变概率 mutateProb =0.2
每轮产生的后代数量 offspringNum = 10,作为最终位置的次数对 fitness 影响的放大倍率 times =100
运行了五次,结果如下
| 使用评估函数的次数 | 分数 | |
|---|---|---|
| 1 | 1760 | 409 |
| 2 | 1980 | -5 |
| 3 | 3740 | 1004 |
| 4 | 2200 | -1 |
| 5 | 2860 | 622 |
地图大小中等,故可将放大倍率稍微调小一些,食物密度大,且大食物多,比较适合这个算法。任务三
对所实现的演化算法进行改进,并在任务二中的几个环境中进行测试。
可能的改进方向:
解的表示改进评估函数改进演化算子改进参数优化
四、改进思路
首先是要改进评估函数,即启发式函数的设计,使之能够利用食物、精灵、和大食物位置信息,因为之前的启发式函数实际上是基于固定位置目标设计的,其实并不适用于吃食物和躲避精灵。改进后应使得趋向于食物和大食物的解的 fitness 小(更优),当处于无敌状态时,趋向于精灵的解的 fitness 小(更优),反之,远离精灵的解的 fitness 小(更优),使 fitness 的计算更加准确。
其次可以将生存选择从保留较优的改为保留较年轻的,这样有助于跳出局部最优。
参数优化与场景本身的性质关系比较大,包括地图大小、墙的布局、任务类型等,可以对不同的场景使用不同的参数组合进行多次测试再取平均,找到更适合每个场景的参数组合。
具体改进和改进后的效率 由于时间关系,未能完成改进的实现,故这一部分略过。
参考文献
- 基于深度学习和行为序列的电影推荐系统研究与实现(西南交通大学·程思)
- 基于回溯蚁群的分类规则算法研究(辽宁工程技术大学·王志鹏)
- 主题爬虫关键技术研究(哈尔滨工程大学·黄正德)
- 基于知识图谱的健康膳食知识智能问答系统(兰州大学·王璐)
- 基于J2EE的数据挖掘系统的设计与实现(暨南大学·叶松云)
- 基于SSH框架的电子宠物系统设计与实现(吉林大学·王丽丽)
- 基于知识图谱的健康膳食知识智能问答系统(兰州大学·王璐)
- 基于深度学习和行为序列的电影推荐系统研究与实现(西南交通大学·程思)
- 基于协同过滤的视频推荐系统(山东大学·王雯思)
- 基于标签的专家信息推荐系统的研究(安徽理工大学·陈俊然)
- 基于LDA模型的豆瓣电影推荐算法研究(杭州电子科技大学·陈超)
- 基于进化算法的局部社团结构发现及其在推荐系统上的应用(西安电子科技大学·王朋)
- 基于回溯蚁群的分类规则算法研究(辽宁工程技术大学·王志鹏)
- 基于J2EE的物流软件系统——仓储管理系统的研究与设计(成都理工大学·隋永)
- 多策略自适应差分进化算法的改进与应用研究(兰州理工大学·霍明明)
本文内容包括但不限于文字、数据、图表及超链接等)均来源于该信息及资料的相关主题。发布者:源码工厂 ,原文地址:https://m.bishedaima.com/yuanma/35997.html









